
Hi, I'm Charles Shaju
Embedded Systems Engineer | AI Enthusiast | Robotics Innovator
Connect with me

See what I'm building

Flagship Work
A preview of embedded, IoT, and autonomy projects. Replace with your live details.
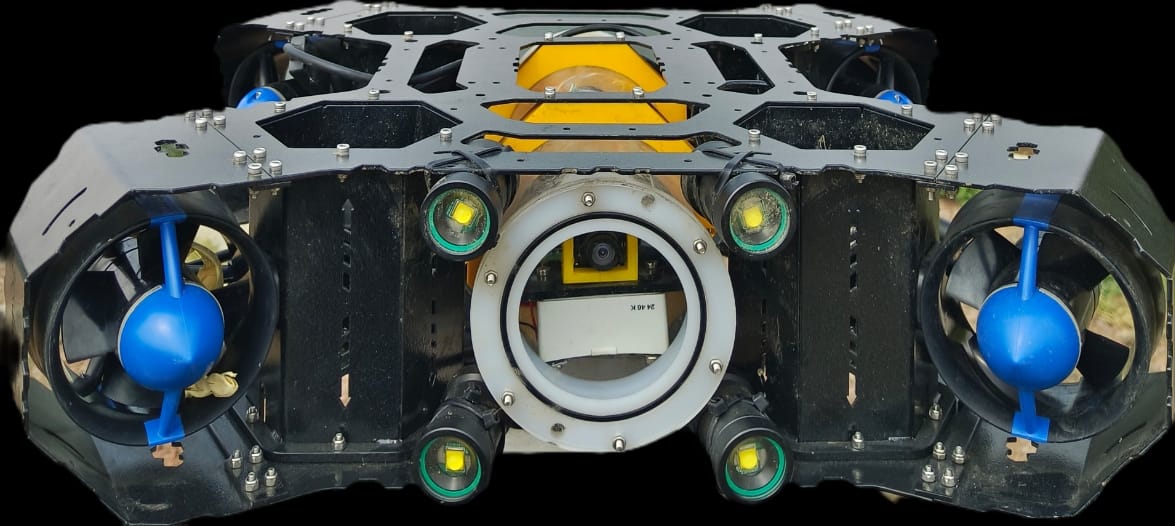
Underwater Remotely Operated Vehicle
ROV platform that surveys dam walls, bridge pilings, and submerged infrastructure for cracks using Pixhawk guidance, embedded control loops, and multi-camera vision.

AquaScanner Bathymetry Catamaran
Autonomous twin-hull vessel that deploys an embedded echosounder suite to chart dam reservoirs and inland waterways for structural assessment and sediment mapping.
Smart Altimeter Module
Prototype high-precision barometric altimeter with auto/manual calibration routines, onboard data logging, and telemetry streaming for UAV telemetry stacks.
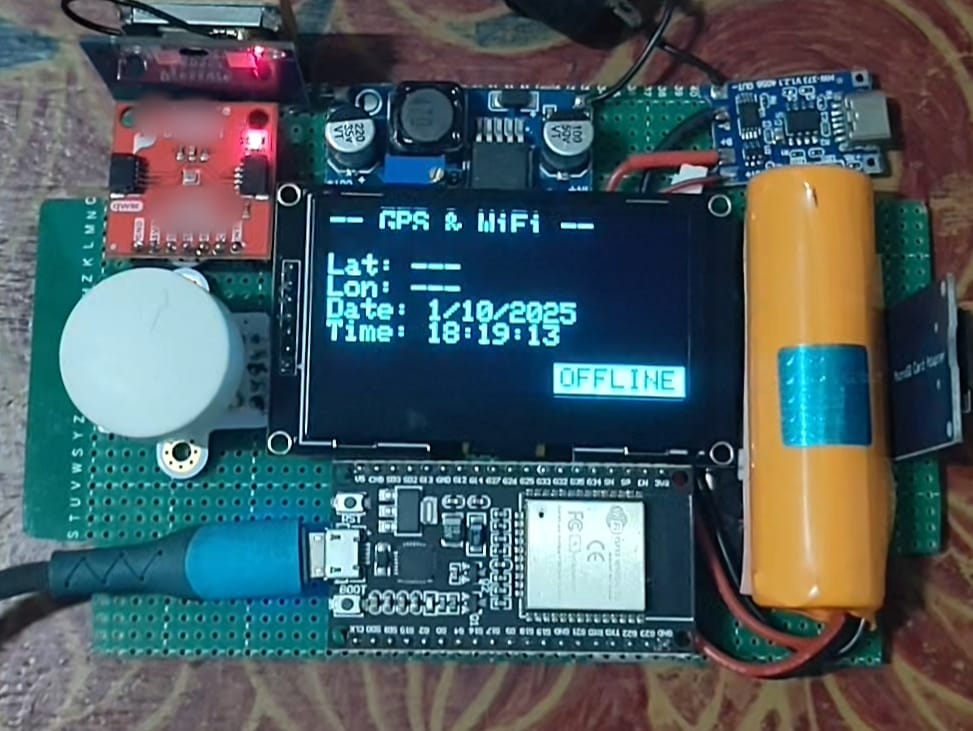
Realtime GPS Tracker with Firebase
Portable tracker that streams GNSS fixes from an ESP32-based board to Firebase for live fleet monitoring, push alerts, and historical route analytics.
Voice Assistant with NeuralIntents
Hands-free assistant that parses wake words, routes intents through a NeuralIntents flow, and speaks responses for home automation and productivity prompts.
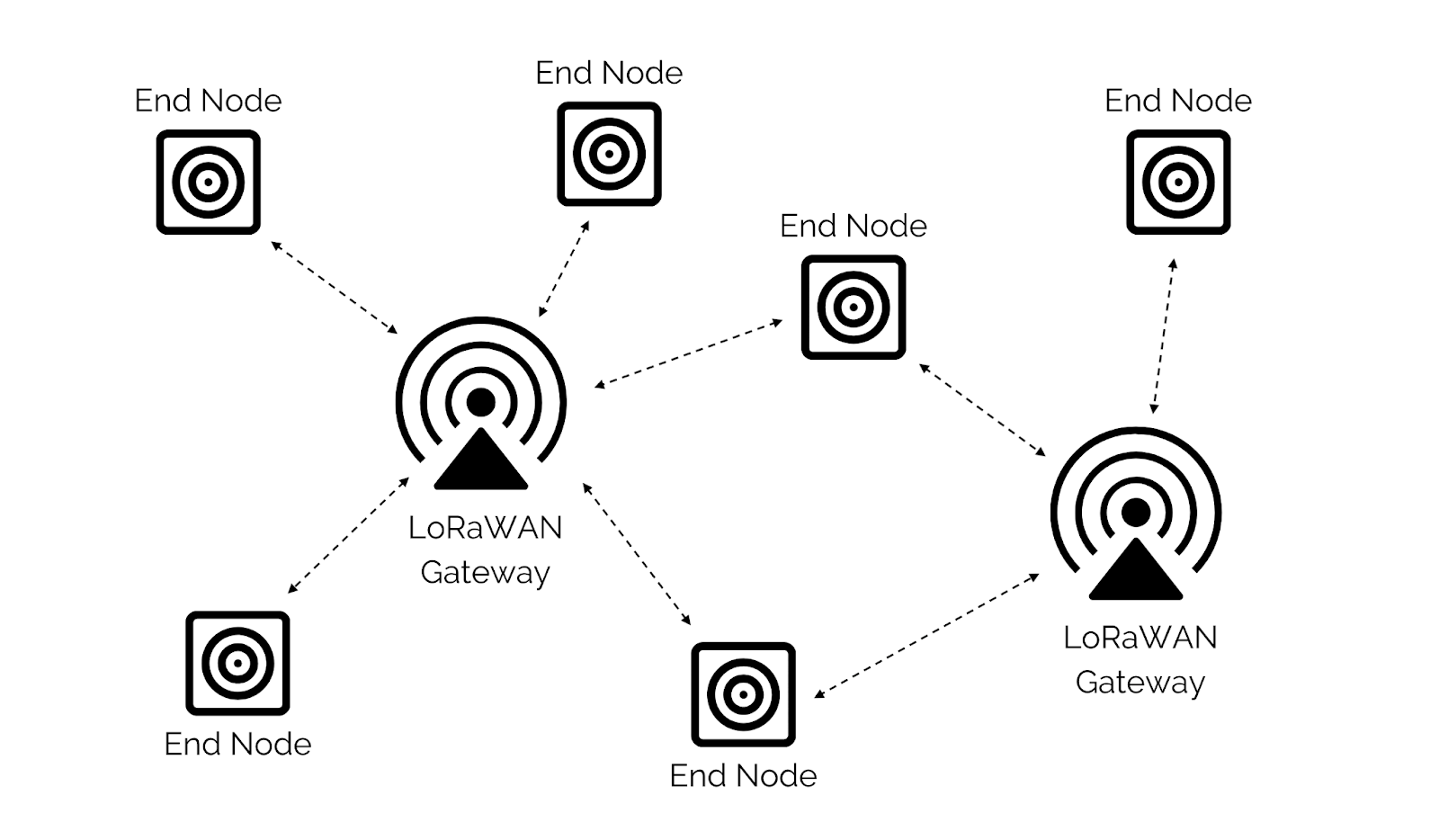
LoRa Mesh Communications on ESP32
Long-range telemetry network using dual ESP32 boards, LoRa radios, and adaptive spreading factors to relay sensor data across remote marine deployments.
Build Journals




UROV-SHM Publication
Indian Application No. 202241040473 A · Published 12 Jul 2024
AN UNDERWATER REMOTELY OPERATED VEHICLE FOR STRUCTURAL HEALTH MONITORING (UROV-SHM)
UROV-SHM executes detailed underwater inspections of dams, tunnels, ship hulls, and bridge piers. Swappable batteries, fiber tethered telemetry, and AI-enhanced sonar/video analytics give real-time crack measurement, precise positioning, and mission resilience in turbulent conditions.
Published in the Indian Patent Office journal.
Core Capabilities & Skill Set
Stacks I rely on across autonomy, real-time firmware, and field robotics engineering.
Programming Languages
- Python
- C / C++
- Java
- SQL
- Bash / Shell scripting
Frameworks & Libraries
- TensorFlow
- Node.js
- OpenCV
- MAVSDK / DroneKit
Tools & Software
- Git & GitHub
- VS Code
- QGroundControl
- KiCad (basic PCB design)
- Linux (Ubuntu / Raspberry Pi OS)
- Serial, UART, I2C, SPI debugging tools
Hardware & Embedded Systems
- ESP32 / ESP8266
- Raspberry Pi (3/4/Zero/CM4)
- Pixhawk (MAVLink, ArduPilot)
- LoRa modules (SX1276/SX1278)
- Sonar systems (Ping2, echosounders)
- Differential thrust systems
- IMU, GPS, Barometer (BMP390), environmental sensors
- BLDC motors + ESCs
- Underwater cameras, low-light systems
- Custom ROVs & Autonomous Surface Vehicles (Aqua-Scanner)
Trusted Credentials
Snapshot
Charles Shaju
Robotics & IoT Enthusiast | 2 Years Experience | MCA (Pursuing)
Currently building a geodata-driven bathymetry pipeline for dam inspections as part of my MCA research, blending sonar analytics with embedded autonomy stacks.
Current Focus
Prototyping AI-assisted geodata processing for sonar maps, tying MCA research to actionable reservoir diagnostics.
Field Experience
Led autonomous ROV and ASV deployments across Kerala dams and Maharashtra shipyards; comfortable with cold-water, low-visibility ops.
Availability
Open to robotics/IoT roles from July 2025 onward, remote-friendly with willingness to travel for marine test campaigns.
Who I Am
I'm Charles Shaju, an MCA student and part-time Embedded Systems Engineer at i4 Marine Technologies. With two years of hands-on experience, I focus on intelligent embedded systems, IoT devices, and autonomous marine technologies.
Coming from a software background, I grew a passion for AI and robotics and enjoy integrating both into practical hardware solutions. That curiosity led me into designing sensors, microcontroller platforms, and embedded solutions that bridge software intelligence with physical hardware.
I thrive on projects involving real-time systems, robotics, automation, underwater technologies, and AI-driven innovation. My goal is to advance intelligent hardware design while blending software, electronics, and machine learning to deliver smarter, more efficient systems.
Let's Collaborate
Tell me about your next embedded mission or robotics concept.